

Introduction
Horticultural therapy is defined as an intervention using horticultural activities for clients with special needs who are being treated by a professional therapist (Relf, 2008; Son et al., 2016). It has been used for therapeutic purposes in various populations with special needs. A recent review article reported the positive effects of horticultural therapy and horticultural activity programs on physical, psychological/emotional, social, cognitive, behavioral, and educational aspects (Park et al., 2016a). In order to explain the therapeutic mechanisms of horticultural intervention, horticultural activity is a major parameter in the interventions that need to be analyzed by using scientific methods in terms of physical, psychological, social, and cognitive aspects.
Previous few studies have been conducted to determine the therapeutic mechanisms of horticultural interventions in physical aspect. Various indoor and outdoor horticultural activities have been previously classified as low to high intensity energy-consuming physical activities (Park et al., 2011, 2013a, 2014a). Moreover, horticultural activities are weight-bearing motions that use upper and lower limb muscles, as well as hand muscles (Park et al., 2013b, 2014b). Accordingly, horticultural interventions are associated with various positive physical health effects such as improved cardiovascular endurance, muscle strength, physical functional ability, hand function, bone mineral density, increased high-density lipoprotein (HDL) cholesterol, decreased blood pressure, and waistline assessments (Bassey and Ramsdale, 1995; Park et al., 2009; Kelley et al., 2013; Park et al., 2016b). Furthermore, horticultural therapy programs have been shown to improve muscle strength and the range of motion in the upper limbs (arm and shoulder) during the rehabilitation of patients who have suffered a stroke (Lee et al., 2012); however, there is still lack of studies to explain the therapeutic mechanisms of horticultural interventions.
of their physical therapeutic mechanisms; therefore, an analysis of their kinematic and kinetic characteristics is needed (Shumway-Cook and Woollacott, 2001; Whittle, 2002). Kinematic analysis is an objective method used to analyze the physical characteristics of motions such as movement times, velocity, and joint angles (Shumway-Cook and Woollacott, 2001; Whittle, 2002), while kinetic analyses are used to assess the power of the human body, such as muscle activation, torque, and moment (Robertson et al., 2013). Kinematic and kinetic analyses have been broadly applied to the analysis of human motions during motor skills development or rehabilitation therapy, in the fields of medicine, rehabilitation, biomechanics, and sports (Keogh and Reid, 2005; Baker, 2006; Kuo et al., 2011).
The objective of the current study was to examine the kinematic and kinetic characteristics of two common horticultural activities, sowing seeds and planting plant, during normal movement without any physical restraints, in order to provide reference data from healthy control subjects.
Materials and Methods
Subjects
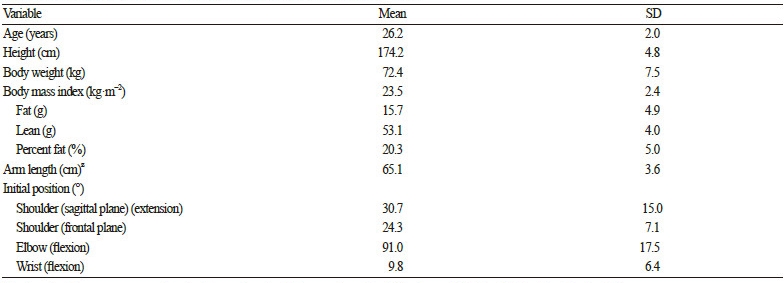
The research volunteer list of Konkuk University, Seoul, South Korea, was used to recruit a convenience sample of male subjects in their 20s. Researchers contacted male university students by phone or through face-to-face contact, providing explanations regarding the objective of study, procedures, schedule, and requirements. Inclusion criteria included no prior surgery of the upper limbs or spine within five years, an absence of musculoskeletal or neurological problems, and right hand dominance (Murphy et al., 2006). The final sample was composed of 31 male university students aged 26.2 ± 2.0 years, whose characteristics are presented in Table 1. The mean height and weight of the subjects was 174.2 ± 4.8 cm and 72.4 ± 7.5 kg, respectively, giving a mean body mass index of 23.5 ± 2.4 kg·m2, which is within the normal range (WHO, 2012).
All subjects completed a consent form before participating in the study. At the completion of the study, the subjects received 20,000 Won as an incentive. This study was approved by the Institutional Review Board of Korea National Institute for Bioethics Policy (P01-201311-BM-02-02).
Experimental Conditions and Initial Positioning
The study was performed in a motor mechanics laboratory at Konkuk University, which contained a desk (1.2 m x 0.8 m x 0.7 m) and a height-adjustable stool were previously prepared in the laboratory. The average temperature and relative humidity in the lab during the experiment were 18.2°C ± 1.4°C and 27.4% ± 7.6%, respectively (Model Acuba CS-201, Digital Hygrothermometer, Chosun, China).
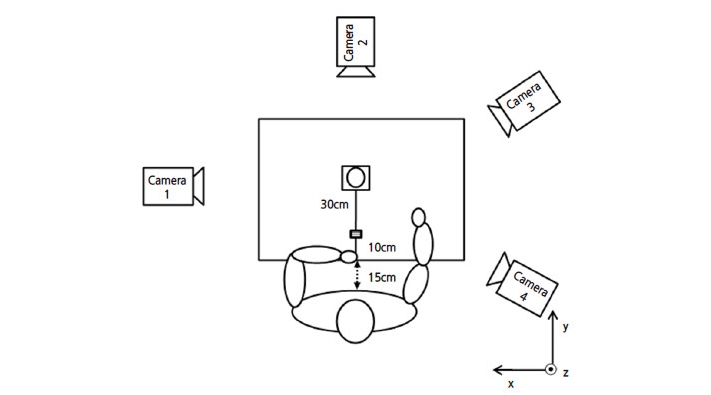
The initial positioning of the subjects before testing was in accordance with previous studies of motion dynamics and kinematics (Murphy et al., 2006, 2011; Yun et al., 2008) (Fig. 1). Each subject sat on the stool with their feet on the floor, and torso positioned in the middle of the desk. The distance between the torso and desk was maintained at 15 cm. The right elbow joint of the subject was bent to 90 degrees, the right hand was placed on the desk with the palm facing the ceiling, and the wrist joint was placed in a neutral condition at 0 degree. The joint angles for shoulder, elbow, and wrist in the initial position were assessed using a threedimensional motion analysis system (Motion master 100, Visol, Gwangmyeongsi, South Korea). The left hand was resting on the lap.
Horticultural Activities
Two common horticultural activities, seed sowing and planting a plant, were selected for analysis as they have previously been shown to be commonly used in interventions for various populations (Park et al., 2016a). In order to ensure all subjects performed the horticultural activities in the same way, a standard operating procedure for the horticultural activities was previously developed by six experts in the field of horticultural therapy, horticultural science, and motion dynamics (Table 2, Fig. 3). A natural method that was as real as possible was recommended. The act of seed sowing was categorized into four types of tasks: positioning a tray, filling the tray with soil, sowing seeds in the tray, and watering the seeds using a spray bottle. Filling the tray with soil was performed twice; before and after the task of sowing seeds in the tray. The act of planting a plant was also categorized into four types of tasks: positioning a pot, filling the pot with soil, planting a plant in the pot, and watering the plant using a watering can. Filling the pot with soil was also performed twice; before and after the task of planting a plant in the pot. A demonstration and oral explanation were provided by the researchers to each subject before the start of each activity. The subjects performed each horticultural activity twice with a 30 s resting period between each activity (Fig. 2). The total experimental time for each subject averaged 60 min.
Table 2. Standard operating procedures for horticulture activity motions performed by the participants.
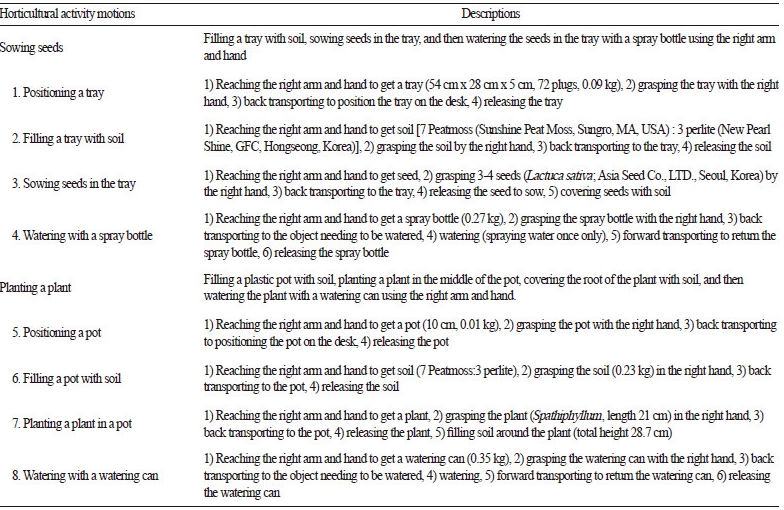 |
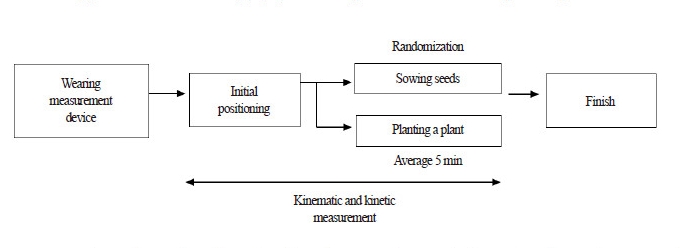
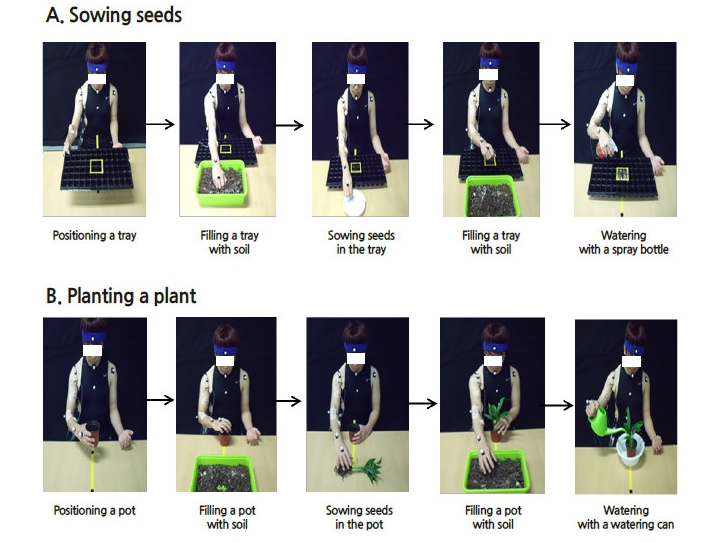
Fig. 3
Horticultural activities performed. A. The act of sowing seeds was categorized into four types of tasks: positioning a tray, filling the tray with soil, sowing seeds in the tray, filling the tray with soil again, and watering the seeds using a spray bottle. B. The act of planting plant was also categorized into four types of tasks: positioning a pot, filling the pot with soil, planting a plant in a pot, and watering the plant using a watering can.
Measurements
Subject Characteristics. Body composition [body weight (kg), percent fat, fat (kg), lean muscle (kg)] was assessed using a body fat analyzer (ioi 353, Jawon Medical, Gyeongsan, South Korea). Height was measured using an anthropometer (model ok7979, Samhwa, Seoul, South Korea). Body mass index was calculated using body weight and height [body mass index (kg·m-2) = weight (kg) / height (m)2]. The length of the arm was assessed as the distance from the right acromion to the middle finger of right hand using a tapeline (model Rollfix, Hoechstmass, Germany) (Roby-Brami et al., 2003).
Kinematic Analysis. A three-dimensional motion analysis system (Motion master 100, Visol) was utilized for the analysis of kinematic factors, which included movement time, peak velocity, the joint angles of the right arm and hand, and grasping patterns. Four cameras (GR-HD1KR, JVC, Yokohama, Japan) were positioned around the testing area as shown in Fig. 1. The capture rate of the four cameras was 60 frames per second and the exposure time was 1/500 s. A standard calibration frame (2 m x 1 m x 1 m) was placed in the testing area and recorded by the cameras for 1 min in order to provide a standard coordinate for data analysis.
Eight spherical 16-mm reflective markers were attached to the skin with double-sided tape. The markers were positioned on the bony prominences in order to reduce the effect of skin movement and to facilitate marker replacement during repeated testing. The markers reflect infrared light from cameras flash, and these markers were used to generate a computer image of movement, as described previously (Murphy et al., 2006; Robertson et al., 2013). Eight positions were selected for marker placement based on previous motion dynamics studies for daily living activities and reaching-grasping rehabilitation training (Michaelsen et al., 2001; Murphy et al., 2006, 2011). These positions were: the head (the very top of the forehead), chin (the protuberance mentalis), chest (upper chest), right shoulder (center of the acromion), left shoulder (center of the acromion), right elbow (the lateral epicondyle and the ulna status), and the right hand (middle finger joint)( Fig. 4).
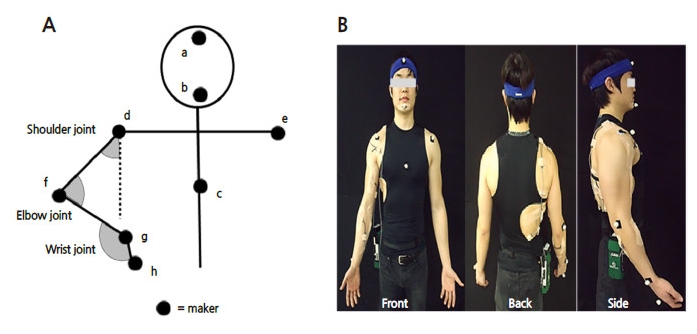
Fig. 4
A. Marker sites are shown as black dots for the capture of movement: (a) Head (very top of the forehead), (b) chin (the protuberance mentalis), (c) chest (upper chest), (d) right shoulder (center of the acromion), (e) left shoulder (center of the acromion), (f) right elbow (the lateral epicondyle), (g) right elbow (the ulna status), (h) right hand (the middle finger joint). B. Subject wearing the markers.
Kinetic Analysis. A portable eight-channel surface electromyography (EMG) device (Telemyo 2400 MR-XP, Noraxon, Scottsdale, AZ, USA) was utilized for the kinetic analysis of muscle activation. EMG is used to measure the electrical signal produced by skeletal muscle during muscular contraction (De Luca, 1997). EMG has been widely utilized to biomechanically analyze human and animal movements (De Luca, 1997; Bolgla and Uhl, 2007), and its reliability has been confirmed in many studies (Lim and Sherwood, 2005; Ochia and Cavanagh, 2007).
Bipolar surface EMG electrodes (Noraxon Dual EMG Electrode, Noraxon) were attached to eight muscles on the right upper limb (arm and shoulder): the anterior deltoid, serratus anterior, biceps brachialis, brachioradialis, flexor carpi radialis, upper trapezius, infraspinatus, and latissimus dorsi (Fig. 5). These muscles were selected as they have previously been shown to be functionally agonistic during horticultural activities, daily living activities, or reaching-gripping rehabilitation training (Falla et al., 2007; Bonnefoy et al., 2009; Vandenberghe et al., 2010; Park et al., 2013b, 2014b). Muscle activation during the horticultural activities was continuously recorded (MyoResearch XP Clinical Edition 1.07, Noraxon). A synchronizer was used during data collection to combine the motion data with synchronized image photography and EMG data.
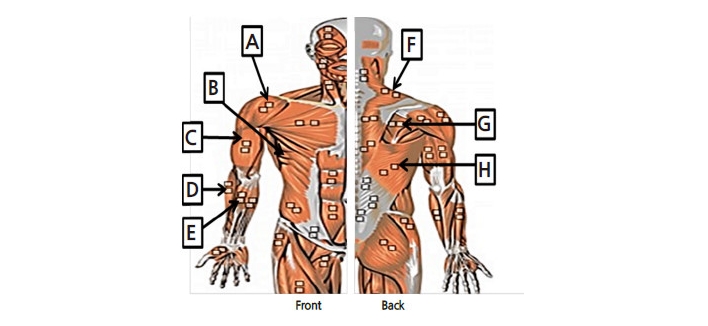
Fig. 5
Shoulder girdle and arm muscles measured by electromyography during two horticultural activities: (A) anterior deltoid, (B) serratus anterior, (C) biceps brachialis, (D) brachioradialis, (E) flexor carpi radialis, (F) upper trapezius, (G) infraspinatus, (H) latissimus dorsi. Image generated using MyoResearch XP Clinical Edition 1.07 software (Noraxon, Scottsdale, AZ, USA).
Data Analysis
Kinematic Factors: Movement Times, Peak Velocity, Joint Angles, and Grasping Patterns. The recorded two-dimensional image photography data was digitized and converted into three-dimensional images using a direct linear transformation method (Abdel- Aziz and Karara, 1971) with Kwon 3D software (XP 3D, Visol). The markers were displayed on the computer images and produced X (forward-back), Y (lateral), and Z (vertical) coordinate values for the measured motions (total 69,670 images).
Movement times were computed for each task and motion during the two horticultural activities. Velocities and peak velocities were analyzed for each task and motion, based on the data from the wrist marker as previously described (Michaelsen et al., 2004). Joint angles were measured by the position of the shoulder flexion and extension in the sagittal plane, the shoulder adduction and abduction in the frontal plane, the elbow flexion and extension, and the wrist flexion and extension (Fig. 4), as previously described (Michaelsen et al., 2001; Murphy et al., 2006, 2011). The shoulder angle was determined as the angle between the vector joining the shoulder and elbow markers, and the vertical vector from the shoulder marker towards the hip. The elbow angle was determined by the angle between the vector joining the elbow and wrist markers, and the vector joining the elbow and shoulder markers. The wrist angle was determined by the angle between the vector joining the elbow and wrist markers, and the vector joining the wrist and hand markers.
Grasping patterns were classified as lateral prehension, fingertip prehension, palmar prehension, or cylindrical prehension using the recorded video images, using the method described by Rönnqvist and Rösblad (2007).
Kinetic Factors: EMG. Raw EMG data were filtered in order to remove noise using a bandpass digital filter with a cut-off frequency of 20 Hz (low) and 250 Hz (high) (Park et al., 2014b; Lee et al., 2015; Xie et al., 2016). In addition, the raw EMG data were converted to integrated EMG (IEMG) data using MyoResearch XP Master Edition software v1.07 (Noraxon) (Park et al., 2014b). IEMG has been recommended as the preferred method to describe muscle activation using surface EMG (Morey-Klapsing et al., 2004; Kim et al., 2013). Normalization of EMG data is necessary because they can be affected by anatomic and physiologic factors in different muscles and individuals (Burden, 2010). EMG amplitude data can be normalized using the amplitude measured during the maximum voluntary contraction (MVC) of the targeted muscles (Mathiassen et al., 1995); thus, the MVC of the selected muscles was measured for each subject using a previously described method (Park et al., 2014b). This MVC value (set to 100%) was used to standardize the muscle activity values during the horticultural activities (% MVC IEMG).
Statistics. The kinematic and kinetic characteristics of the tasks and phases during the horticultural activities were compared using one-way analyses of variance (ANOVA) and Duncan’s multiple range tests conducted with SPSS (v18 for Windows; IBM, Armonk, NY, USA). In addition, Mann-Whitney U tests were performed for comparisons involving the phases of watering and forward transporting. The significance level was p < 0.05. Demographic data such as age, height, body weight, body composition, arm length, and the joint angles in the initial position were analyzed using Excel (Microsoft Office 2002; Microsoft Corp., Redmond, WA, USA). Because the repeated tasks of adding soil to the tray or pot were conducted using the same method and the data were same, the repeated data were combined during the analysis. Watering with a watering can or with a spray bottle included two more phases than the other tasks performed, so the statistical analysis for the total movement times during these activities was conducted separately.
Results
Phase Definitions for Horticultural Tasks
The two horticultural activities (seed sowing and planting a plant) each consisted of five tasks (Table 2, Fig. 3). The specific phases within each task were defined as reaching, grasping, back transporting, watering, forward transporting, and releasing. Most of the tasks performed included reaching, grasping, back transporting, and releasing; for example, the task of positioning a tray involved: 1) reaching the right arm to get a tray, 2) grasping the tray with the right hand, 3) back transporting to position the tray on the desk, and 4) releasing the tray. Watering with a spray bottle or watering can included two additional phases: forward transporting and watering. The tasks of watering were therefore: 1) reaching the right arm to get a spray bottle or watering can, 2) grasping the spray bottle or watering can with the right hand, 3) back transporting to the object needing to be watered, 4) watering, 5) forward transporting to return the spray bottle or watering can, and 6) releasing the spray bottle or watering can.
Movement Times
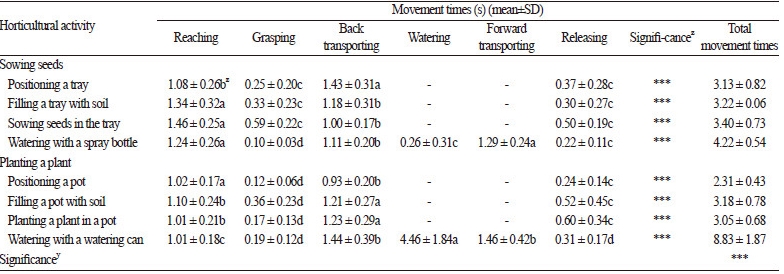
The movement times for each task and phase were calculated for the two horticultural activities. Among the total of six different types of tasks with four motion phases, sowing seeds in the tray (3.40 ± 0.73 s) required significantly more time to perform compared the other five tasks (p = 0.001) (Table 3). In the tasks with six phases (watering with a watering can or a spray bottle), watering with a watering can (8.83 ± 1.87 s) required significantly more time to perform than watering with a spray bottle (4.22 ± 0.54 s) (p = 0.001) (Table 3). Thus, the subjects spent more time on the tasks requiring involving heavier tools (spray bottle: 0.27 kg; watering can: 0.35 kg) and those with the two additional phases, although the motion of grasping tiny lettuce seeds between fingers also took more time to perform.
Between the four common phases (reaching, grasping, back transporting, and releasing), subjects spent significantly more time reaching and back transporting (Table 3). When watering with a spray bottle, subjects spent significantly more time in the watering phase than the other five phases. Reaching and forward transporting required significantly more time to perform than other phases during the task of watering with a watering can.
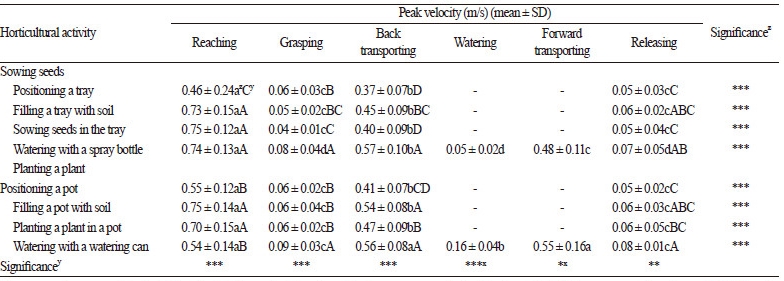
Motion Velocity
The velocity for each task and phase was determined based on the data from the wrist marker (Table 4, Fig. 6). Among the eight phases, the reaching phase had a significantly higher peak velocity than other phases, and had the highest peak velocity during five of the different tasks: filling a tray with soil (0.73 ± 0.15 m/s), filling a pot with soil (0.75 ± 0.14 m/s), sowing seeds in the tray (0.75 ± 0.12 m/s), planting a plant in a pot (0.70 ± 0.15 m/s), and watering with a spray bottle (0.74 ± 0.13 m/s). In the tasks of watering with a watering can, back transporting and forward transporting had similar peak velocities to the reaching phase.
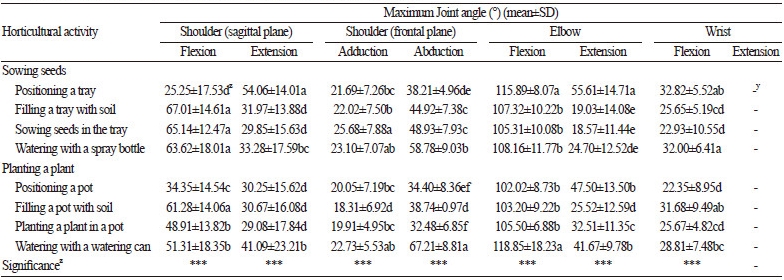
Joint Angles
Joint angles were calculated for the shoulder in the sagittal plane (flexion and extension) and frontal plane (abduction and adduction), for the elbow (extension and flexion), and for the wrist (extension and flexion) (Table 5). A lower joint angle indicates a greater shoulder adduction and elbow extension. During seed sowing, shoulder flexion was significantly increased compared to other tasks when the subjects were filling a tray with soil (67.01 ± 14.61°), sowing seeds in the tray (65.14 ± 12.47°), watering with a spray bottle (63.62 ± 18.01°), and filling a pot with soil (61.28 ± 14.06°) (p = 0.001), while shoulder extension was significantly increased during the task of positioning a tray (54.06 ± 14.01°; p = 0.001). When subjects planted a plant, they had significantly more shoulder adduction during tasks such as filling a pot with soil (18.31 ± 6.92°), planting a plant in a pot (19.91 ± 4.95°), positioning a pot (20.05 ± 7.19°), and positioning a tray (21.69 ± 7.26°), compared to other tasks (p = 0.001). Shoulder abduction was significantly higher in the task of watering with a watering can (67.21 ± 8.81°) than in others (p = 0.001). Positioning a tray (115.89 ± 8.07°) and watering with a watering can (118.85 ± 18.23°) led to significantly higher elbow flexion compared to other tasks (p = 0.001), while elbow extension was significantly increased in the filling a tray with soil (19.03 ± 14.08°) and sowing seeds in the tray (18.57 ± 11.44°) (p = 0.001). Wrist flexion was significantly increased during the tasks of positioning a tray (32.82 ± 5.52°), watering with a spray bottle (32.00 ± 6.41°), and filling a pot with soil (31.68 ± 9.49°) (p = 0.001); however, wrist extension was not observed during these horticultural tasks.
In addition, reaching, grasping, and back transporting resulted in significantly higher joint angles in the shoulder, elbow, and wrist than other phases (data not shown). Shoulder extension and adduction as well as elbow flexion during the reaching phase were significantly higher than the other phases. Grasping led to significantly increased shoulder flexion and elbow extension, while shoulder abduction and wrist flexion were increased during back transporting.
Grasping Patterns
Grasping patterns can be broadly classified into power or precision grasps (Napier, 1956; MacKenzie and Iberall, 1994). The power grasp uses five fingers and the entire palm while grasping an object, and examples include a cylinder grasp, ball grasp, and hook grasp. The precision grasp is generally used to grasp an object for fine manipulations, for example a plate grasp, pinch grasp, key grasp, and pincer grasp (Tyldesley and Grieve, 2009). During the horticultural activities, subjects positioning a tray exhibited a grasping pattern similar to the lateral prehension observed in tasks such as transporting a dish or turning a key, while sowing seeds in the tray required a fingertip prehension similar to grasping a small object such as a button or pin. Subjects planting a plant in a pot exhibited a palmar prehension similar to grasping a pen, while transporting a pot using a watering can required a cylindrical grasp (data not shown).
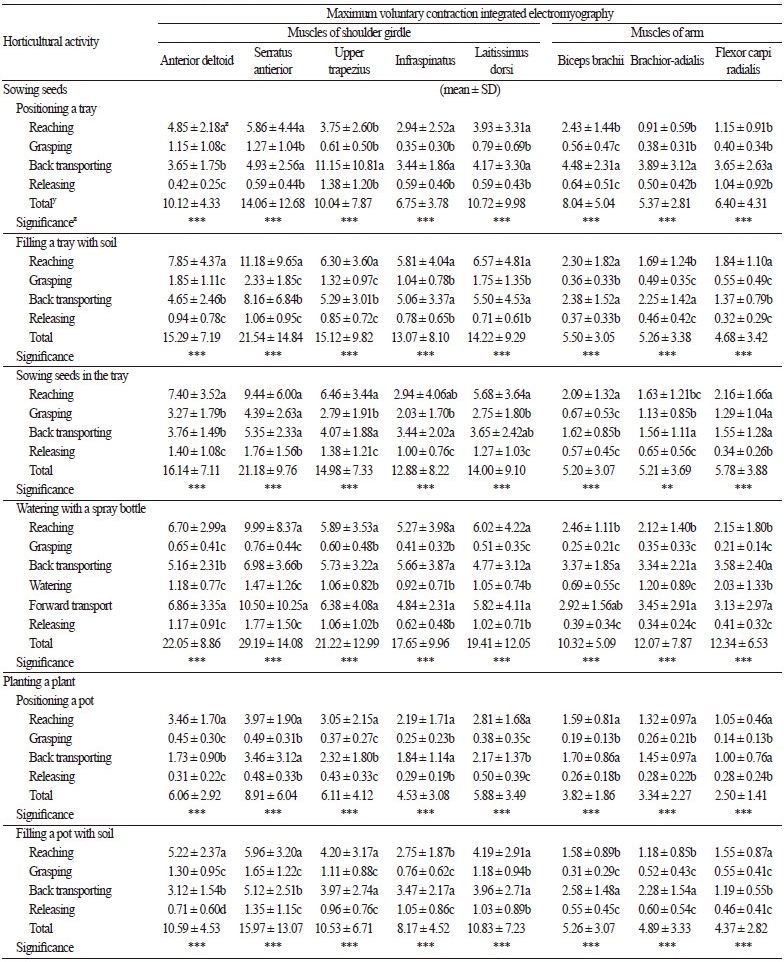
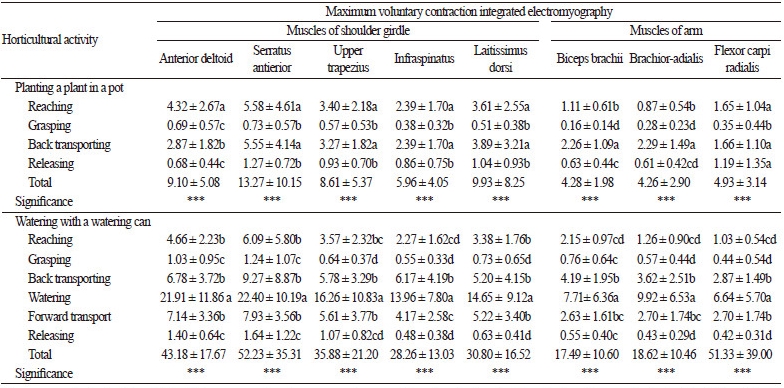
Muscle Activation
The muscle activity of five muscles on the shoulder girdle (the anterior deltoid, serratus anterior, upper trapezius, infraspinatus, and laitissimus dorsi) and three muscles on the arm (the biceps brachii, brachioradialis, and flexor carpi radialis) was assessed throughout the two horticultural activities (Table 6). During the eight tasks, the serratus anterior on the shoulder girdle was activated to a significantly greater extent than the other muscles tested (p = 0.001). In particular, the EMG data for the serratus anterior was highest when subjects were watering with a watering can. The muscles of the shoulder girdle were activated to a significantly greater extent compared to the arm muscles during the tasks of filling a tray with soil, sowing seeds in the tray, watering with a spray bottle, and positioning a pot (p = 0.001). During watering with a watering can, the flexor carpi radialis of the arm was also activated to a significantly greater extent, in comparison to the other arm muscles tested (p = 0.001). During the act of seed sowing, reaching, back transporting, and forward transporting required a greater activation of the shoulder girdle muscles compared to grasping and releasing (p = 0.001). While planting a plant, reaching, back transporting, and watering caused a greater activation of the shoulder girdle muscles (p = 0.001).
Discussion
This study provides kinematic and kinetic reference data for common horticultural activities using a kinematic and kinetic analysis. The results of the study support the findings of previous studies and provide valuable information for the development of specialized horticultural therapy programs as discussed below.
Kinematic Factors
Subjects spent significantly more time in the reaching, back transporting, forward transporting, or watering phases compared other phases (Table 3). These findings support the results of a previous study involving a three-dimensional kinematic motion analysis of drinking from a glass, where subjects also spent more time in the reaching and back transporting phases compared to forward transporting and returning phases (Murphy et al., 2006). Movement times can be influenced by the characteristics or location of the object, as more distant and smaller objects require more movement time during the activities of daily living (Castiello et al., 1992, 1993a; Coats et al., 2008; Cicerale et al., 2014). The functional motion of putting a 5-cm piece of wood in a box took a total movement time of 1.15-1.43 s (Coluccini et al., 2007), while the total movement times of the horticultural tasks tested in the present study were 2.31-8.83 s; however, more time may be required according to the delicacy of the task. In the current study, the movement time for working with the horticultural materials showed similar characteristics to that of daily living activities, suggesting that the horticultural tasks can be used for training or treatment in rehabilitation for daily living activities.
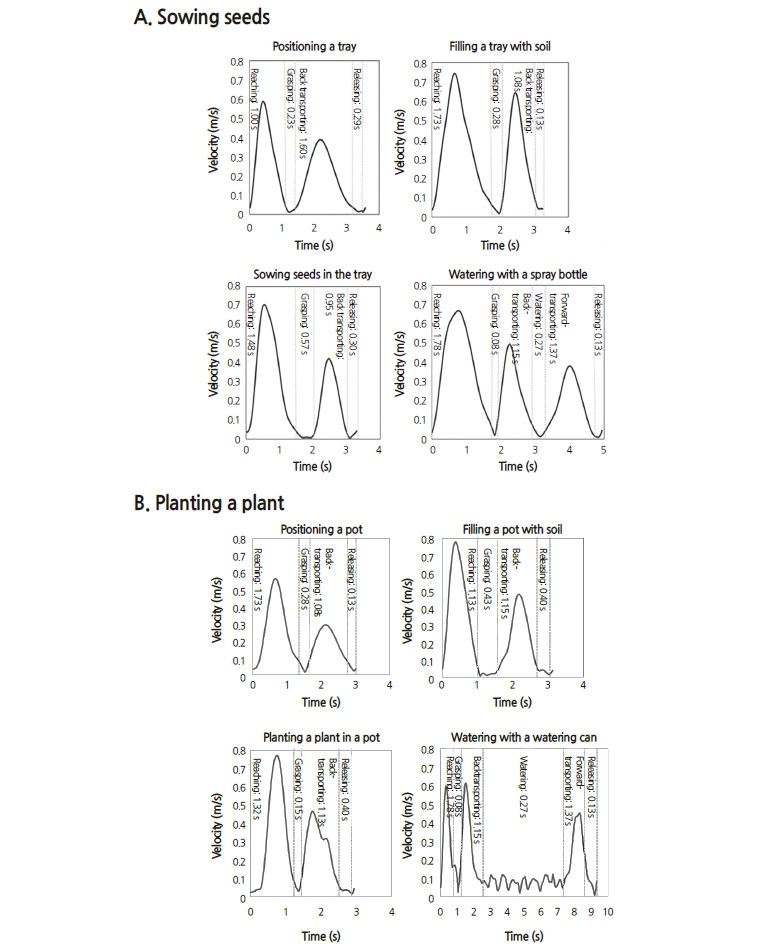
Subjects performed the reaching phase with greater speed compared to other phases (Table 4, Fig. 6). Similarly, a previous study demonstrated that for drinking (a daily living activity), the peak velocity was greatest during the reaching phase (0.55 ± 0.08 m/s) compared to other phases such as forward transport, drinking, back transport, and returning (Murphy et al., 2006). The peak velocity can be influenced by the materials or tools required to perform a task, and the accuracy and precision required (Castiello, 1996); in the case of a tiny or precious object such as seed, subjects need to allow time for adequate attention to the performance of the task. In the current study, tasks involving handled objects such as a spray bottle or watering can were also associated with a higher velocity; the handle induces behavior affordance and helps in grasping the object easily, prompting automatic actions in the motor cortex in brain (Handy et al., 2003; Masson et al., 2011; Bub et al., 2013). The velocity graphs for six of the horticultural tasks, including positioning a tray or pot, filling a tray or pot with soil, sowing seeds in the tray, and planting a plant in a pot exhibited two bell shaped curves (Fig. 6). In contrast, the velocity graphs for watering with a spray bottle and watering with a watering can exhibited three bell shaped curves. These graph patterns coincided with reaching and grasping rehabilitation training motions (Gentilucci et al., 2001; Murphy et al., 2006, 2011; Coluccini et al., 2007; Coats et al., 2008); thus, these horticultural tasks can be used in reaching and grasping rehabilitation training for patients.
The results for the range of joint motion during the horticultural tasks are similar to previous studies about upper limb functional tasks conducted by Artilheiro et al. (2014) and van Andel et al. (2008). Murphy et al. (2006) reported that the angles of shoulder flexion, shoulder adduction, and elbow extension of grasping in a drinking motion were 48.9 ± 5.1°, 10.6 ± 4.6°, 42.5 ± 7.3°, respectively. The joint angles of the horticultural tasks tested in the present study also showed a similar range but were significantly different across the tasks (Table 5). Among the eight horticultural tasks, watering with a watering can led to a greater shoulder abduction, elbow flexion, and wrist flexion than other tasks. The task of positioning a tray significantly increased shoulder extension and elbow flexion. In addition, the joint angles patterns were significantly different for watering with a spray bottle compared to those for watering with a watering can. The watering task with a spray bottle showed significantly higher shoulder flexion and wrist flexion than the watering task with a watering can. On the other hands, the task of watering with a watering can showed significantly higher shoulder abduction and elbow flexion than the watering task with a spray bottle. Accordingly, different horticultural tasks can be selected for a treatment depending on the therapeutic objective and the client’s condition.
Grasping patterns differed between the tasks involved in the horticultural activities, and are known to determine kinematic characteristics (Castiello et al., 1992, 1993a; 1993b; Castiello, 1996). Castiello (1996) investigated the grasping patterns involved in holding an apple (whole-hand prehension), tangerine (small whole-hand prehension), banana (clench), and cherry (fingertip prehension). When subjects performed a precision grip like that involved in grasping a cherry, it took significantly more time compared to the gripping motion involved in whole-hand prehension, small whole-hand prehension, or clenching.
Kinetic Factors
The EMG data for the serratus anterior was highest among the muscles tested. The serratus anterior anatomically plays a role in the stability of the scapula and is the muscle used during the protraction of the arm (Paine and Voight, 1993; Ekstrom et al., 2004), and Potten et al. (1999) reported that reaching over a larger distance results in higher activation of this muscle. The results of the current study demonstrate that the motions involved in horticultural activity are similar to reaching and grasping training motions. Moreover, the muscles on the shoulder girdle were activated to a significantly greater extent compared to the muscles on the arm during horticultural activities; for example, tasks such as filling a tray with soil, sowing seeds in the tray, watering with a spray bottle, and positioning a pot showed higher muscle activation for the five muscles on shoulder girdle than for the arm muscles. Similarly, the upper trapezius was previously shown to be activated to a significantly greater extent than the muscles of the forearm in various horticultural activities performed at a desk in a sitting position (Park et al., 2013b). During watering with a watering can, an additional muscle, the flexor carpi radialis of the arm, was activated to a significantly greater extent compared to the other muscles tested. This muscle can be used to support a weighty tool, which corresponds to the previous finding that watering with a watering can was the highest weight-bearing activity among all of the activities (Park et al., 2013b).
In a previous study examining EMG activation during five gardening activities including digging, raking, troweling, weeding, and hoeing, the activation of the upper limb muscles was found to be greater than that of the lower limb muscles, which were mainly used to support the body (Park et al., 2014b). The right flexor carpi ulnaris and brachioradialis showed the highest activation during these gardening activities compared to the other upper and lower limb muscles measured (Park et al., 2014b). The upper limbs play a crucial role in various daily living activities such as drinking, eating, and writing; thus, exercising the upper limb muscles positively impacts the maintenance and improves the performance of daily living activities (Murphy et al., 2006). For example, during a horticultural therapy program developed based on EMG data, which included flower arrangement tasks consisting of cutting, bending, winding, and fixing motions, stroke patients demonstrated improved overall upper limb function, grip strength, and range of motion.
Conclusions
This study provides reference data for common horticultural activities using kinematic and kinetic analyses. Horticultural activities consist of complex tasks in terms of kinematics, containing several different motions such as reaching, grasping, back transporting, watering, forward transporting, and releasing. The analysis of horticultural activities demonstrates kinematic and kinetic similarities to reaching and grasping rehabilitation training or daily living activities; therefore, horticultural tasks have a potential for clinical use. In addition, horticultural activities provide goal-oriented and taskoriented tasks by using living plants, providing clients with additional benefits such as psychological well-being (Armstrong, 2000), motivation for participation in a therapy session (Bird, 2004), and enjoyment derived from living plants (Lekies and Sheavly, 2007; Park et al., 2008). The reference data in this study provides useful information for the development of a horticultural therapy program for the rehabilitation of upper limbs; moreover, the information about the kinematic and kinetic characteristics of horticultural tasks can be used to support the physical therapeutic mechanisms of horticultural interventions. Future studies are needed to analyze the kinematic and kinetic characteristics of subjects with impairments and disabilities of the upper extremities.
